/PROP/TYPE13 (SPR_BEAM)
- Ключевое слово формата блока. Это свойство пружины типа балки работает как балка.
элемент с шестью независимыми режимами деформации. Этой весной приходится нелинейная жесткость, демпфирование и разная разгрузка. Деформация, сила и разрушение, основанное на энергии критерии имеются.
Формат
/PROP/TYPE13/prop_ID/unit_ID or /PROP/SPR_BEAM/prop_ID/unit_ID |
/PROP/TYPE13/prop_ID/unit_ID or /PROP/SPR_BEAM/prop_ID/unit_ID |
/PROP/TYPE13/prop_ID/unit_ID or /PROP/SPR_BEAM/prop_ID/unit_ID |
/PROP/TYPE13/prop_ID/unit_ID or /PROP/SPR_BEAM/prop_ID/unit_ID |
/PROP/TYPE13/prop_ID/unit_ID or /PROP/SPR_BEAM/prop_ID/unit_ID |
/PROP/TYPE13/prop_ID/unit_ID or /PROP/SPR_BEAM/prop_ID/unit_ID |
/PROP/TYPE13/prop_ID/unit_ID or /PROP/SPR_BEAM/prop_ID/unit_ID |
/PROP/TYPE13/prop_ID/unit_ID or /PROP/SPR_BEAM/prop_ID/unit_ID |
/PROP/TYPE13/prop_ID/unit_ID or /PROP/SPR_BEAM/prop_ID/unit_ID |
/PROP/TYPE13/prop_ID/unit_ID or /PROP/SPR_BEAM/prop_ID/unit_ID |
prop_title |
prop_title |
prop_title |
prop_title |
prop_title |
prop_title |
prop_title |
prop_title |
prop_title |
prop_title |
Масса |
Масса |
Инерция |
Инерция |
Skew_ID |
sens_ID |
Исфлаг |
Если не удалось |
Иленг |
Если2 |
Индекс нагрузки = 1: растяжение/сжатие
K1 |
K1 |
C1 |
C1 |
A1 |
A1 |
B1 |
B1 |
D1 |
D1 |
fct_ID11 |
H1 |
fct_ID21 |
fct_ID31 |
fct_ID41 |
\(\delta_{min}^{1}\) |
\(\delta_{min}^{1}\) |
\(\delta_{max}^{1}\) |
\(\delta_{max}^{1}\) |
|
F1 |
F1 |
E1 |
E1 |
Аскаль1 |
Аскаль1 |
масштаб1 |
масштаб1 |
Индекс нагрузки=2: сдвиг XY
K2 |
K2 |
C2 |
C2 |
A2 |
A2 |
B2 |
B2 |
D2 |
D2 |
fct_ID12 |
H2 |
fct_ID22 |
fct_ID32 |
fct_ID42 |
\(\delta_{min}^{2}\) |
\(\delta_{min}^{2}\) |
\(\delta_{max}^{2}\) |
\(\delta_{max}^{2}\) |
|
F2 |
F2 |
E2 |
E2 |
Аскале2 |
Аскале2 |
Hscale2 |
Hscale2 |
Индекс нагрузки=3: сдвиг XZ
K3 |
K3 |
C3 |
C3 |
A3 |
A3 |
B3 |
B3 |
D3 |
D3 |
fct_ID13 |
H3 |
fct_ID23 |
fct_ID33 |
fct_ID43 |
\(\delta_{min}^{3}\) |
\(\delta_{min}^{3}\) |
\(\delta_{max}^{3}\) |
\(\delta_{max}^{3}\) |
|
F3 |
F3 |
E3 |
E3 |
Аскаль3 |
Аскаль3 |
Hscale3 |
Hscale3 |
Индекс нагрузки=4: кручение
K4 |
K4 |
C4 |
C4 |
A4 |
A4 |
B4 |
B4 |
D4 |
D4 |
fct_ID14 |
H4 |
fct_ID24 |
fct_ID34 |
fct_ID44 |
\(\theta_{min}^{4}\) |
\(\theta_{min}^{4}\) |
\(\theta_{max}^{4}\) |
\(\theta_{max}^{4}\) |
|
F4 |
F4 |
E4 |
E4 |
Аскаль4 |
Аскаль4 |
Hscale4 |
Hscale4 |
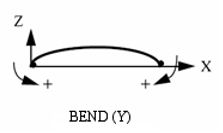
Индекс нагрузки = 5: изгиб Y
K5 |
K5 |
C5 |
C5 |
A5 |
A5 |
B5 |
B5 |
D5 |
D5 |
fct_ID15 |
H5 |
fct_ID25 |
fct_ID35 |
fct_ID45 |
\(\theta_{min}^{5}\) |
\(\theta_{min}^{5}\) |
\(\theta_{max}^{5}\) |
\(\theta_{max}^{5}\) |
|
F5 |
F5 |
E5 |
E5 |
Аскаль5 |
Аскаль5 |
Hscale5 |
Hscale5 |
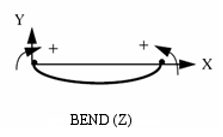
Индекс нагрузки=6: изгиб Z
K6 |
K6 |
C6 |
C6 |
A6 |
A6 |
B6 |
B6 |
D6 |
D6 |
fct_ID16 |
H6 |
fct_ID26 |
fct_ID36 |
fct_ID46 |
\(\theta_{min}^{6}\) |
\(\theta_{min}^{6}\) |
\(\theta_{max}^{6}\) |
\(\theta_{max}^{6}\) |
|
F6 |
F6 |
E6 |
E6 |
Аскаль6 |
Аскаль6 |
Hscale6 |
Hscale6 |
\(v_{0}\) |
\(v_{0}\) |
\(\omega_{0}\) |
\(\omega_{0}\) |
Fcut |
Fcut |
Фгладкий |
|||
C1 |
C1 |
n1 |
n1 |
\(\alpha_{1}\) |
\(\alpha_{1}\) |
\(\beta_{1}\) |
\(\beta_{1}\) |
||
C2 |
C2 |
n2 |
n2 |
\(\alpha_{2}\) |
\(\alpha_{2}\) |
\(\beta_{2}\) |
\(\beta_{2}\) |
||
C3 |
C3 |
n3 |
n3 |
\(\alpha_{3}\) |
\(\alpha_{3}\) |
\(\beta_{3}\) |
\(\beta_{3}\) |
||
C4 |
C4 |
n4 |
n4 |
\(\alpha_{4}\) |
\(\alpha_{4}\) |
\(\beta_{4}\) |
\(\beta_{4}\) |
||
C5 |
C5 |
n5 |
n5 |
\(\alpha_{5}\) |
\(\alpha_{5}\) |
\(\beta_{5}\) |
\(\beta_{5}\) |
||
C6 |
C6 |
n6 |
n6 |
\(\alpha_{6}\) |
\(\alpha_{6}\) |
\(\beta_{6}\) |
\(\beta_{6}\) |
Определение
Поле |
Содержание |
Пример единицы СИ |
|---|---|---|
prop_ID |
Недвижимость идентификатор.(Целое число, максимум 10 цифр) |
|
unit_ID |
Идентификатор единицы измерения.(Целое число, максимум 10 цифр) |
|
prop_title |
Недвижимость заголовок.(Символ, максимум 100 символов) |
|
Масса |
Масса (Реал) |
\([kg]\) |
Инерция |
Весна инерция.(Реальная) |
\([m^{2}kg]\) |
Skew_ID |
Система наклона идентификатор.(Целое число) |
|
sens_ID |
Идентификатор датчика. = 0 Весна активна. (Целое число) |
|
Исфлаг |
Флаг датчика. 3 =0 Пружинный элемент активируется при активации sens_ID и не может быть деактивирован. =1 Пружинный элемент деактивируется при активации sens_ID и не может быть деактивирован. =2 Соответствие состояний активированного или деактивированного элемента Spring состояние датчика и может переключаться вперед и назад. начальная длина пружины ( \(l_{0}\) ) основано на весне длина на момент активации. (Целое число) |
|
Если не удалось |
Критерии неудачи. = 0 Однонаправленные критерии. = 1 Разнонаправленные критерии. (Целое число) |
|
Иленг |
Ввод на единицу длины флаг. 4 5 = 0 Свойства Spring вводятся, как описано в таблица определений. = 1 Масса пружины и инерция указаны на единицу длины. Жесткость пружины является инженерной функцией. напряжение. (Целое число) |
|
Если2 |
Флаг модели отказа. 7 = 0 (по умолчанию) Критерии перемещения и вращения. = 1 Критерии перемещения и вращения со скоростью эффект. = 2 Критерии силы и момента. = 3 Внутренние энергетические критерии. (Целое число) |
|
Ki |
Если fct_ID1i = 0: Жесткость при линейной нагрузке и разгрузке. Если fct_ID1i ≠ 0: Используется только в качестве разгрузочной жесткости для упругопластические пружины. \(i\) = 1, 2, 3 — перевод ГРИП. \(i\) = 4, 5, 6 — вращение ГРИП.(Реальная) |
\([\frac{N}{m}]\) если \(i\) = 1, 2, 3 \([\frac{Nm}{rad}]\) если \(i\) = 4, 5, 6 |
Ci |
Демпфирование. 1 \(i\) = 1, 2, 3 — перевод ГРИП. \(i\) = 4, 5, 6 — вращение ГРИП.(Реальная) |
\([\frac{Ns}{m}]\) если \(i\) = 1, 2, 3 \([\frac{Nms}{rad}]\) если \(i\) = 4, 5, 6 |
Ai |
Нелинейная жесткость масштабный коэффициент функции. \(i\) = 1, 2, 3 — перевод ГРИП. \(i\) = 4, 5, 6 — вращение ГРИП.По умолчанию = 1,0 (Реальный) |
\([N]\) если \(i\) = 1, 2, 3 \([Nm]\) если \(i\) = 4, 5, 6 |
Bi |
Масштабный коэффициент для эффекты логарифмической скорости. \(i\) = 1, 2, 3 — перевод ГРИП. \(i\) = 4, 5, 6 — вращение ГРИП.По умолчанию = 0,0 (Реальный) |
\([N]\) если \(i\) = 1, 2, 3 \([Nm]\) если \(i\) = 4, 5, 6 |
Di |
Масштабный коэффициент для эффекты логарифмической скорости. \(i\) = 1, 2, 3 — перевод ГРИП. \(i\) = 4, 5, 6 — вращение ГРИП.По умолчанию = 1,0 (Реальный) |
\([\frac{m}{s}]\) если \(i\) = 1, 2, 3 \([\frac{rad}{s}]\) если \(i\) = 4, 5, 6 |
fct_ID1i |
Идентификатор функции определение нелинейной жесткости \(f()\) . 5 = 0 Линейная пружина жесткостью К. Если Привет=4: Функция определяет верхнюю кривую доходности. \(i\) = 1, 2, 3 — перевод ГРИП. \(i\) = 4, 5, 6 — вращение ГРИП.(Целое число) |
|
Hi |
Флаг пружинной закалки для нелинейная пружина. = 0 Эластичная пружина. = 1 Нелинейная упругопластическая пружина с изотропным закалка. = 2 Нелинейная упругопластическая пружина с несцепленной закалка. = 4 Нелинейная упругая пластиковая пружина с кинематикой закалка. = 5 Нелинейная упругопластическая пружина с нелинейным разгрузка. = 6 Нелинейная упругопластическая пружина изотропной закалки. и нелинейная разгрузка. = 7 Нелинейная упругая пластиковая пружина с резинкой гистерезис. \(i\) = 1, 2, 3 — перевод ГРИП. \(i\) = 4, 5, 6 — вращение ГРИП.(Целое число) |
|
fct_ID2i |
Идентификатор функции определение силы или момента как функции скорости пружины, \(g()\) . \(i\) = 1, 2, 3 — перевод ГРИП. \(i\) = 4, 5, 6 — вращение ГРИП.(Целое число) |
|
fct_ID3i |
Идентификатор функции.Если Привет =4: Определяет нижнюю кривую доходности. Если Привет =5: определяет остаточное смещение или вращение против максимального смещения или вращения. Если Привет =6: определяет нелинейную разгрузку. кривая.Если Привет =7: Определяет нелинейную кривую разгрузки. \(i\) = 1, 2, 3 — перевод ГРИП. \(i\) = 4, 5, 6 — вращение ГРИП.(Целое число) |
|
fct_ID4i |
Идентификатор функции для нелинейное демпфирование, \(h()\) . \(i\) = 1, 2, 3 — перевод ГРИП. \(i\) = 4, 5, 6 — вращение ГРИП.(Целое число) |
|
\(\delta_{min}^{i}\) |
Отрицательный перевод предел отказа. Если \(i\) = 1, 2, 3 — перевод ГРИП.По умолчанию = -1030 (Реальный) |
|
ЕслиНеудач2 = 0 или 1: отказ смещение. |
\([m]\) |
|
ЕслиНеудач2 = 2: Сила отказа. |
\([N]\) |
|
ЕслиНеудач2 = 3: Сбой внутренней энергии. |
\([J]\) |
|
\(\theta_{min}^{i}\) |
Отрицательное вращение предел неудач. \(i\) = 4, 5, 6 — вращение ГРИП.По умолчанию = -1030 (Реальный) |
|
ЕслиНеудач2 = 0, 1: Сбой вращение. |
\([rad]\) |
|
ЕслиНеудач2 = 2: Момент отказа. |
\([N⋅m]\) |
|
ЕслиНеудач2 = 3: Сбой внутренней энергии. |
\([J]\) |
|
\(\delta_{max}^{i}\) |
Положительный перевод предел неудач. \(i\) = 1, 2, 3 — перевод ГРИП.По умолчанию = -1030 (Реальный) |
|
ЕслиНеудач2 = 0 или 1: отказ смещение. |
\([m]\) |
|
ЕслиНеудач2 = 2: Сила отказа. |
\([N]\) |
|
ЕслиНеудач2 = 3: Сбой внутренней энергии. |
\([J]\) |
|
\(\theta_{max}^{i}\) |
Положительное вращение предел неудач. \(i\) = 4, 5, 6 — вращение ГРИП.По умолчанию = -1030 (Реальный) |
|
ЕслиНеудач2 = 0 или 1: отказ вращение. |
\([rad]\) |
|
ЕслиНеудач2 = 2: Момент отказа. |
\([N⋅m]\) |
|
ЕслиНеудач2 = 3: Сбой внутренней энергии. |
\([J]\) |
|
Fi |
Масштабный коэффициент по оси абсцисс для функции демпфирования \(g\) и \(h\) . \(i\) = 1, 2, 3 — перевод ГРИП. \(i\) = 4, 5, 6 — вращение ГРИП.По умолчанию = 1,0 (Реальный) |
\([\frac{m}{s}]\) если \(i\) = 1, 2, 3 \([\frac{rad}{s}]\) если \(i\) = 4, 5, 6 |
Ei |
Масштабный коэффициент по оси ординат для функция демпфирования \(g\) . \(i\) = 1, 2, 3 — перевод ГРИП. \(i\) = 4, 5, 6 — вращение ГРИП.(Реальная) |
\([N]\) если \(i\) = 1, 2, 3 \([Nm]\) если \(i\) = 4, 5, 6 |
Аскалей |
Масштабный коэффициент по оси абсцисс для функция жесткости \(f\) . \(i\) = 1, 2, 3 — перевод ГРИП. \(i\) = 4, 5, 6 — вращение ГРИП.По умолчанию = 1,0 (Реальный) |
\([m]\) если \(i\) = 1, 2, 3 \([rad]\) если \(i\) = 4, 5, 6 |
Хскалей |
Масштабный коэффициент по оси ординат для функция демпфирования \(h\) . \(i\) = 1, 2, 3 — перевод ГРИП. \(i\) = 4, 5, 6 — вращение ГРИП.По умолчанию = 1,0 (Реальный) |
\([N]\) если \(i\) = 1, 2, 3 \([Nm]\) если \(i\) = 4, 5, 6 |
\(v_{0}\) |
Справочник переводной скорость.По умолчанию = 1,0 (Реальная) |
\([\frac{m}{s}]\) |
\(\omega_{0}\) |
Справочный ротационный скорость.По умолчанию = 1,0 (Реальная) |
\([\frac{rad}{s}]\) |
Fcut |
Снижение скорости деформации частота.По умолчанию = 1030 (Реальное) |
\([Hz]\) |
Фгладкий |
Флаг скорости плавной деформации. = 0 (по умолчанию) Сглаживание скорости деформации неактивно. = 1 Сглаживание скорости деформации активно. (Целое число) |
|
Ci |
Коэффициент относительной скорости. \(i\) = 1, 2, 3 — перевод ГРИП. \(i\) = 4, 5, 6 — вращение ГРИП.По умолчанию = 0,0 (Реальный) |
|
ЕслиНеудач2 = 0 или 1: Смещение при отказе или вращение. |
\([m]\) если \(i\) = 1, 2, 3 \([rad]\) если \(i\) = 4, 5, 6 |
|
ЕслиНеудач2 = 2: Сила или момент разрушения. |
\([N]\) если \(i\) = 1, 2, 3 \([N⋅m]\) если \(i\) = 4, 5, 6 |
|
ЕслиНеудач2 = 3: Коэффициент внутреннего отказа энергия. |
\([J]\) |
|
ni |
Относительный показатель скорости. \(i\) = 1, 2, 3 — перевод ГРИП. \(i\) = 4, 5, 6 — вращение ГРИП.По умолчанию = 0,0 (Реальный) |
|
\(\alpha_{i}\) |
Масштабный коэффициент отказа. \(i\) = 1, 2, 3 — перевод ГРИП. \(i\) = 4, 5, 6 — вращение ГРИП.По умолчанию = 1,0 (Реальный) |
|
\(\beta_{i}\) |
Экспонента. \(i\) = 1, 2, 3 — перевод ГРИП. \(i\) = 4, 5, 6 — вращение ГРИП.По умолчанию = 2,0 (Реальный) |
Пример (пружинная балка)
/UNIT/2
unit for prop
Mg mm s
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/PROP/TYPE13/1/2
spr_beam example
# Mass Inertia skew_ID sens_ID Isflag Ifail Ileng Ifail2
2.7e-5 2e-4 0 0 0 0 0 0
# K1 C1 A1 B1 D1
7e+4 0 0 0 0
# fct_ID11 H1 fct_ID21 fct_ID31 fct_ID41 delta_min1 delta_max1
0 0 0 0 0 0 0
# F1 E1 Ascale1 Hscale1
0 0 0 0
# K2 C2 A2 B2 D2
7e+4 0 0 0 0
# fct_ID12 H2 fct_ID22 fct_ID32 fct_ID42 delta_min2 delta_max2
0 0 0 0 0 0 0
# F2 E2 Ascale2 Hscale2
0 0 0 0
# K3 C3 A3 B3 D3
7e+4 0 0 0 0
# fct_ID13 H3 fct_ID23 fct_ID33 fct_ID43 delta_min3 delta_max3
0 0 0 0 0 0 0
# F3 E3 Ascale3 Hscale3
0 0 0 0
# K4 C4 A4 B4 D4
1e+5 0 0 0 0
# fct_ID14 H4 fct_ID24 fct_ID34 fct_ID44 delta_min4 delta_max4
0 0 0 0 0 0 0
# F4 E4 Ascale4 Hscale4
0 0 0 0
# K5 C5 A5 B5 D5
1e+5 0 0 0 0
# fct_ID15 H5 fct_ID25 fct_ID35 fct_ID45 delta_min5 delta_max5
0 0 0 0 0 0 0
# F5 E5 Ascale5 Hscale5
0 0 0 0
# K6 C6 A6 B6 D6
1e+5 0 0 0 0
# fct_ID16 H6 fct_ID26 fct_ID36 fct_ID46 delta_min6 delta_max6
0 0 0 0 0 0 0
# F6 E6 Ascale6 Hscale6
0 0 0 0
# V0 Omega0 F_cut Fsmooth
0 0 0 0
# C n alpha beta
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
#ENDDATA
Комментарии
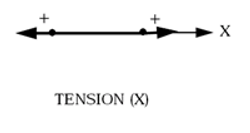
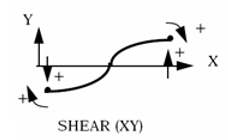
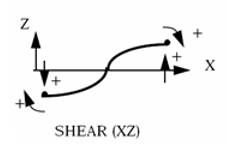
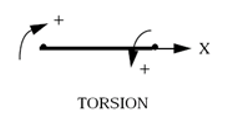
Вводы повторяются в течение
каждая степень свободы (DOF)
\(i\) определяются следующими направлениями: - \(i\)
=1: растяжение/сжатие
\(i\) =2: сдвиг xy
\(i\) =3: сдвиг xz
\(i\) =4: кручение
\(i\) =5: изгиб y
\(i\) =6: изгиб z
Весна
\(X\) направление определяется с помощью узлов N1 и N2
весна.
Если узел пружины N3 определен, то пружина \(Y^{′}\) направление определяется с помощью узлов N1 и N3
весны. N3, N2 и N1 не должны находиться в одной строке.
The \(Z\) направление такое: \(Z=X\LambdaY^{′}\)
Если узел N3 не определен во входных данных элемента и система асимметрии
определены в
/PROP/TYPE23 (SPR_MAT) вход, \(Z\) направление такое: \(Z=X\LambdaY_{skew}\)
Если ни узел N3, ни система асимметрии не определены во входных данных, \(Z\) направление такое: \(Z=X\LambdaY_{global}\)
Кроме тех случаев, когда весна местная \(X\) направление и \(Y_{global}\) коллинеарны, то: \(Z=X\LambdaX_{global}\) Наконец,
\(Y\) направление находится как:
\(Y=Z\LambdaX\)
Пружина активирована
и/или деактивировано датчиком, определенным в
sens_ID и зависит от I флаг : - Если Isflag = 0, пружинный элемент активируется sens_ID и не может быть активирован.
деактивирован. Начальная длина пружины зависит от пружины. длина во времени = 0.
Если Исфлаг =
1, пружинный элемент деактивируется sens_ID и не может быть активирован. Начальная длина пружины зависит от пружины. длина во времени = 0.
If I флаг = 2 , пружина активируется и/или деактивируется sens_ID и может переключаться
состояние активации несколько раз. Если датчик активирован, пружина
активный; если датчик деактивирован, пружина деактивируется. Весна
начальная длина,
\(l_{0}\) , — расстояние между узлами пружины при
время срабатывания датчика.
If
I длина = 1 ,
Свойства пружины основаны на исходной длине пружины. Входные данные должны быть
введено как:
Каждая пружина будет иметь следующие свойства в
модель:
Где, \(M\) , \(K\) и \(C\) Значения пружины, введенные в поля свойств пружины \(m\) , \(k\) и \(c\) Фактическая физическая масса, жесткость и демпфирование пружины. \(l_{0}\) Начальная длина пружины, которая представляет собой расстояние между узлом N1 и
N2 весны
\(\delta_{min}^{1}and\delta_{max}^{1}\) Значения отказов введены как инженерная деформация
Сила и момент
расчет. Дополнительную информацию см.
Формулировка жесткости в Руководство пользователя . Если
Иленг = 0, поступательное ГРИП \(i\)
- =1,2,3 — использовать смещение для определения пружины
силы и используйте угол вращения в радианах для вращательных степеней свободы. \(i\)
- =4,5,6 для определения моментов пружин.
значения сил и моментов в пружине рассчитываются как: - Линейная пружина:
\(F(\delta)=K_{i}\delta^{i}+C_{i}\dot{\delta}^{i}\)
с \(i\)
- =1,2,3
\(M(\theta)=K_{i}\theta^{i}+C_{i}\dot{\theta}^{i}\)
с \(i\)
- =4,5,6
Нелинейная пружина: \(F(\delta)=f(\frac{\delta^{i}}{Ascale_{i}})[A_{i}+B_{i}ln|\frac{\dot{\delta}^{i}}{D_{i}}|+E_{i}g(\frac{\dot{\delta}^{i}}{F_{i}})]+C_{i}\dot{\delta}^{i}+Hscale_{i}h(\frac{\dot{\delta}^{i}}{F_{i}})\)
с \(i\)
- =1,2,3
\(M(\theta)=f(\frac{\theta^{i}}{Ascale_{i}})[A_{i}+B_{i}ln|\frac{\dot{\theta}^{i}}{D_{i}}|+E_{i}g(\frac{\dot{\theta}^{i}}{F_{i}})]+C_{i}\dot{\theta}^{i}+Hscale_{i}h(\frac{\dot{\theta}^{i}}{F_{i}})\)
с \(i\)
- =4,5,6
Где, - \(\delta^{i}\)
(с \(−l_{0}<\delta^{i}<+\infty\) ) это разница
между текущей длиной
\(l\) и начальная длина \(l_{0}\) пружинного элемента
для соответствующей поступательной глубины резкости.
\(\theta^{i}\) это относительный угол
для соответствующей вращательной глубины резкости в радианах.
Для линейных пружин \(f(\delta),g(\dot{\delta})\) и \(h(\dot{\delta}),(f(\theta),g(\dot{\theta})andh(\dot{\theta}))\) являются нулевыми функциями и \(A_{i}\) , \(B_{i}\) , \(E_{i}\) и \(Hscale_{i}\) не принимаются во внимание
счет.
Если функция жесткости \(f(\delta)\) or \(f(\theta)\) запрашивается, то \(K\) используется в качестве уклона для
только разгрузка.
If \(K\) ниже, чем
максимальное отклонение функции
\(f(\delta)\) or \(f(\theta)\) ( \(K\) не соответствует
максимальный наклон кривой),
\(K\) установлен на максимум
наклон кривой.
Если Ileng = 1, поступательная степень свободы.
\(i\)
- =1,2,3 - использовать инженерную деформацию (удлинение
на единицу длины) для определения пружинных усилий и использования количества оборотов на единицу длины. длина для вращающихся степеней свободы \(i\)
- =4,5,6 для определения моментов пружин. Весна
- параметры связаны с начальной длиной пружины.
Силы и
моменты пружины рассчитываются как:
\(F(\epsilon)=f(\frac{\epsilon^{i}}{Ascale_{i}})[A_{i}+B_{i}ln(max(1,|\frac{\dot{\epsilon}^{i}}{D_{i}}|))+E_{i}g(\frac{\dot{\epsilon}^{i}}{F_{i}})]+C_{i}\dot{\epsilon}^{i}+Hscale_{i}h(\frac{\dot{\epsilon}^{i}}{F_{i}})\) с \(i\) =1,2,3
\(M(\frac{\theta}{l_{0}})=f(\frac{\frac{\theta}{l_{0}}^{i}}{Ascale_{i}})[A_{i}+B_{i}ln(max(1,|\frac{\frac{\dot{\theta}}{l_{0}}^{i}}{D_{i}}|))+E_{i}g(\frac{\frac{\dot{\theta}}{l_{0}}^{i}}{F_{i}})]+C_{i}\frac{\theta}{l_{0}}^{i}+Hscale_{i}h(\frac{\frac{\dot{\theta}}{l_{0}}^{i}}{F_{i}})\) с \(i\) =4,5,6
Где, \(\epsilon^{i}=\frac{\delta^{i}}{l_{0}}\) Инженерное напряжение \(\frac{\theta}{l_{0}}\) Вращение, разделенное на исходную длину пружины
Временной шаг
расчет.
Шаг по времени для поступательной глубины резкости рассчитывается как: \(\Delta t_{i}=\frac{\sqrt{M⋅max(K_{i})+C_{i}^{2}}−C_{i}}{max(K_{i})}\) с
\(i\)
- =1, 2, 3
Шаг по времени для вращательной глубины резкости рассчитывается как: \(\Delta t_{i}=\frac{\sqrt{I⋅max(K'_{i})+C'_{i}^{2}}−C'_{i}}{max(K'_{i})}\) с
\(i\)
- =4, 5, 6
Где, \(K'_{i}=max(K_{t})⋅L^{2}+max(K_{i})\) \(C'_{i}=max(C_{t})⋅L^{2}+max(C_{i})\) с
\(i\)
- =1, 2, 3 и
\(i\)
- =4, 5, 6 и
\(min(\Delta t_{i})\) используется как шаг пружины.
Критерии отказа:
Для критериев однонаправленного разрушения I неудача =0, весна
терпит неудачу, как только один из критериев удовлетворяется в одном
направление:
\(\alpha_{i}(\frac{\delta^{i}}{\delta_{max}^{i}})\ge1\) or \(\alpha_{i}|\frac{\delta^{i}}{\delta_{min}^{i}}|\ge1\) с
\(\delta_{max}^{i}\) и \(\delta_{min}^{i}\) являются пределами отказа в направление \(i\) =1,2,3
\(\alpha_{i}(\frac{\theta^{i}}{\theta_{max}^{i}})\ge1\) or \(\alpha_{i}|\frac{\theta^{i}}{\theta_{min}^{i}}|\ge1\) с
\(\theta_{max}^{i}\) и \(\theta_{min}^{i}\) являются пределами отказа в направление \(i\)
- =4,5,6
По каждому направлению
\(\delta_{min}^{i}\) (или \(\theta_{min}^{i}\)
- ) должно быть отрицательным и
\(\delta_{max}^{i}\) (или \(\theta_{max}^{i}\)
- ) должно быть положительным. Если значения
- равны нулю, то отказ не будет учитываться.
Для критериев разнонаправленного отказа I неудача =1, весна
терпит неудачу, если выполняются следующие критерии:
\(\underset{i=1,2,3}{\sum}\alpha_{i}(\frac{\delta^{i}}{\delta_{fail}^{i}})^{\beta_{i}}+\underset{i=4,5,6}{\sum}\alpha_{i}(\frac{\theta^{i}}{\theta_{fail}^{i}})^{\beta_{i}}\ge1\) - Для «старой» формулировки смещения
(
I неудача2 = 0), коэффициенты \(\alpha_{i}\) и \(\beta_{i}\) равны 1,0 и 2,0,
соответственно.
Новая формулировка смещения
(
I неудача2 =1) позволяет моделировать предел отказа, зависящий от скорости, для
поступательная глубина резкости:
\(\delta_{fail}^{i}={\delta_{max}^{i}+c_{i}⋅|\frac{v^{i}}{v_{0}}|^{ni},if(\delta^{i}>0)\delta_{min}^{i}−c_{i}⋅|\frac{v^{i}}{v_{0}}|^{ni},if(\delta^{i}\le0)\) с
\(i\) =1,2,3
\(\theta^{i}_{fail}={\theta_{max}^{i}+c_{i}⋅|\frac{\omega^{i}}{\omega_{0}}|^{ni},if(\theta^{i}>0)\theta_{min}^{i}−c_{i}⋅|\frac{\omega^{i}}{\omega_{0}}|^{ni},if(\theta^{i}\le0)\) с
\(i\) =4,5,6
Где,
\(\delta_{min}^{i}\) или \(\delta_{max}^{i}\) статическое смещение предел отказа (строки 5, 8 и 11) и \(\nu_{0}\) это ссылка скорость.
Где,
\(\theta_{min}^{i}\) или \(\theta_{max}^{i}\) статическое вращение предел отказа (строки 14, 17 и 20) и \(\omega_{0}\) это ссылка скорость.
Коэффициенты относительной скорости,
\(c_{i}\) (с \(i\)
- =1,2,3) имеют единицы измерения
перемещение и \(c_{i}\) (с \(i\)
- =4,5,6) имеют единицы измерения
- вращение.
Критерии разрушения по силе или моменту активируются с помощью I неудача2 =2: \(\delta^{i}_{fail}={\delta_{max}^{i}+c_{i}⋅|\frac{v^{i}}{v_{0}}|^{ni},if(\delta^{i}>0)\delta_{min}^{i}−c_{i}⋅|\frac{v^{i}}{v_{0}}|^{ni},if(\delta^{i}\le0)\) с
\(i\) =1,2,3 для силы критерии
\(\theta^{i}_{fail}={\theta_{max}^{i}+c_{i}⋅|\frac{\omega^{i}}{\omega_{0}}|^{ni},if(\theta^{i}>0)\theta_{min}^{i}−c_{i}⋅|\frac{\omega^{i}}{\omega_{0}}|^{ni},if(\theta^{i}\le0)\) с
\(i\) =4,5,6 на данный момент критерии
Где,
\(\delta_{min}^{i}\) или \(\delta_{max}^{i}\) статический предел отказа сила (строки 5, 8 и 11) и \(\nu_{0}\) это ссылка скорость.
Где,
\(\theta_{min}^{i}\) или \(\theta_{max}^{i}\) статический предел отказа момент (строки 14, 17 и 20) и \(\omega_{0}\) это ссылка скорость.
Коэффициенты относительной скорости,
\(c_{i}\) (с \(i\)
- =1,2,3) имеют единицы измерения
сила и \(c_{i}\) (с \(i\)
- =4,5,6) имеют единицы измерения
- импульс.
Критерий энергетического сбоя активируется с помощью I неудача2 =
3:
\(\delta^{i}_{fail}=\delta_{max}^{i}+c_{i}⋅|\frac{v^{i}}{v_{0}}|^{ni},if(\delta^{i}>0)\) с
\(i\) =1,2,3
\(\theta^{i}_{fail}=\theta_{max}^{i}+c_{i}⋅|\frac{\omega^{i}}{\omega_{0}}|^{ni},if(\theta^{i}>0)\) с
\(i\) =4,5,6
Где,
\(\delta_{max}^{i}\) статический предел отказа поступательная энергия (строки 5, 8 и 11) и \(\nu_{0}\) это ссылка скорость.
Где,
\(\theta_{max}^{i}\) статический предел отказа энергия вращения (строки 14, 17 и 20) и \(\omega_{0}\) это ссылка скорость.
В этом случае значения смещения равны
заменены положительными значениями энергии разрушения и вращения значения заменяются положительной энергией отказа ценности.
Коэффициенты относительной скорости,
\(c_{i}\) иметь единицы энергия.
Пружинные элементы с сенсорной активацией
или деактивация в основном используются в моделях с предварительным натяжением.