/PROP/TYPE25 (SPR_AXI)
- Ключевое слово формата блока. Этот набор свойств используется для определения
Набор свойств осесимметричной пружины.
Формат
/PROP/TYPE25/prop_ID/unit_ID or /PROP/SPR_AXI/prop_ID/unit_ID |
/PROP/TYPE25/prop_ID/unit_ID or /PROP/SPR_AXI/prop_ID/unit_ID |
/PROP/TYPE25/prop_ID/unit_ID or /PROP/SPR_AXI/prop_ID/unit_ID |
/PROP/TYPE25/prop_ID/unit_ID or /PROP/SPR_AXI/prop_ID/unit_ID |
/PROP/TYPE25/prop_ID/unit_ID or /PROP/SPR_AXI/prop_ID/unit_ID |
/PROP/TYPE25/prop_ID/unit_ID or /PROP/SPR_AXI/prop_ID/unit_ID |
/PROP/TYPE25/prop_ID/unit_ID or /PROP/SPR_AXI/prop_ID/unit_ID |
/PROP/TYPE25/prop_ID/unit_ID or /PROP/SPR_AXI/prop_ID/unit_ID |
/PROP/TYPE25/prop_ID/unit_ID or /PROP/SPR_AXI/prop_ID/unit_ID |
/PROP/TYPE25/prop_ID/unit_ID or /PROP/SPR_AXI/prop_ID/unit_ID |
prop_title |
prop_title |
prop_title |
prop_title |
prop_title |
prop_title |
prop_title |
prop_title |
prop_title |
prop_title |
Масса |
Масса |
Инерция |
Инерция |
Skew_ID |
sens_ID |
Исфлаг |
Если не удалось |
Иленг |
Если2 |
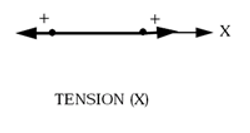
Загрузка индекс = 1 : Напряжение/Сжатие
K1 |
K1 |
C1 |
C1 |
A1 |
A1 |
B1 |
B1 |
D1 |
D1 |
fct_ID11 |
H1 |
fct_ID21 |
fct_ID31 |
F1 |
F1 |
\(\delta_{min}^{1}\) |
\(\delta_{min}^{1}\) |
\(\delta_{max}^{1}\) |
\(\delta_{max}^{1}\) |
Аскаль1 |
Аскаль1 |
E1 |
E1 |
fct_ID41 |
масштаб1 |
масштаб1 |
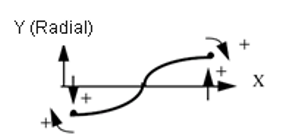
Загрузка индекс = 2 : Сдвиг (Радиальный)
K2 |
K2 |
C2 |
C2 |
A2 |
A2 |
B2 |
B2 |
D2 |
D2 |
fct_ID12 |
H2 |
fct_ID22 |
fct_ID32 |
F2 |
F2 |
\(\delta_{min}^{2}\) |
\(\delta_{min}^{2}\) |
\(\delta_{max}^{2}\) |
\(\delta_{max}^{2}\) |
Аскале2 |
Аскале2 |
E2 |
E2 |
fct_ID42 |
Hscale2 |
Hscale2 |
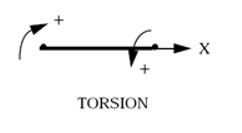
Загрузка индекс = 3 : Торсион
K3 |
K3 |
C3 |
C3 |
A3 |
A3 |
B3 |
B3 |
D3 |
D3 |
fct_ID13 |
H3 |
fct_ID23 |
fct_ID33 |
F3 |
F3 |
\(\theta_{min}^{3}\) |
\(\theta_{min}^{3}\) |
\(\theta_{max}^{3}\) |
\(\theta_{max}^{3}\) |
Аскаль3 |
Аскаль3 |
E3 |
E3 |
fct_ID43 |
Hscale3 |
Hscale3 |
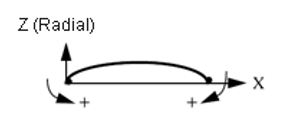
Загрузка индекс = 4 : Изгиб (Радиальный)
K4 |
K4 |
C4 |
C4 |
A4 |
A4 |
B4 |
B4 |
D4 |
D4 |
fct_ID14 |
H4 |
fct_ID24 |
fct_ID34 |
F4 |
F4 |
\(\theta_{min}^{4}\) |
\(\theta_{min}^{4}\) |
\(\theta_{max}^{4}\) |
\(\theta_{max}^{4}\) |
Аскаль4 |
Аскаль4 |
E4 |
E4 |
fct_ID44 |
Hscale4 |
Hscale4 |
\(v_{0}\) |
\(v_{0}\) |
\(\omega_{0}\) |
\(\omega_{0}\) |
||||||
C1 |
C1 |
n1 |
n1 |
\(\alpha_{1}\) |
\(\alpha_{1}\) |
\(\beta_{1}\) |
\(\beta_{1}\) |
||
C2 |
C2 |
n2 |
n2 |
\(\alpha_{2}\) |
\(\alpha_{2}\) |
\(\beta_{2}\) |
\(\beta_{2}\) |
||
C3 |
C3 |
n3 |
n3 |
\(\alpha_{3}\) |
\(\alpha_{3}\) |
\(\beta_{3}\) |
\(\beta_{3}\) |
||
C4 |
C4 |
n4 |
n4 |
\(\alpha_{4}\) |
\(\alpha_{4}\) |
\(\beta_{4}\) |
\(\beta_{4}\) |
Определение
Поле |
Содержание |
Пример единицы СИ |
|---|---|---|
prop_ID |
Недвижимость идентификатор.(Целое число, максимум 10 цифр) |
|
unit_ID |
Идентификатор единицы измерения.(Целое число, максимум 10 цифр) |
|
prop_title |
Недвижимость заголовок.(Символ, максимум 100 символов) |
|
Масса |
Весенняя месса. Если Иленг = 0, \(M\) Если Иленг = 1, \(M⋅l_{0}\) (Реал) |
\([kg]\) или \([kg⋅m]\) |
Инерция |
Пружинная инерция. Если Иленг = 0, \(I\) Если Иленг = 1, \(I⋅l_{0}\) (Реал) |
\([m^{2}kg]\) или \([m^{3}kg]\) |
Skew_ID |
Система наклона идентификатор.(Целое число) |
|
sens_ID |
Датчик идентификатор.(Целое число) |
|
Исфлаг |
Флаг датчика. 4 =0 Пружинный элемент активирован. =1 Пружинный элемент деактивирован. (Целое число) |
|
Если не удалось |
Критерии неудачи. = 0 Однонаправленные критерии. = 1 Разнонаправленные критерии. (Целое число) |
|
Иленг |
Ввод на единицу длины флаг. 2 = 0 Сила пружины рассчитывается, как и ранее. подробная формула. = 1 Все входные данные относятся к единице длины. (Целое число) |
|
Если2 |
Флаг модели отказа. = 0 (по умолчанию) Критерии смещения (или вращения). = 1 Критерии смещения (или вращения) с учетом скорости эффект. = 2 Критерии силы (или момента). = 3 Внутренние энергетические критерии. (Целое число) |
|
Ki |
Жесткость \(K\) с Ileng=0 или \(\frac{K}{l_{0}}\) с Иленг=1. Если \(i\) =1 Жесткость на растяжение/сжатие. Если \(i\) =2 Жесткость на сдвиг (радиальная). (Настоящий) |
\([\frac{N}{m}]\) или \([\frac{N}{m^{2}}]\) |
Жесткость \(K\) с Ileng=0 или \(\frac{K}{\theta_{0}}\) с Иленг=1. Если \(i\) =3 Жесткость на кручение. Если \(i\) =4 Жесткость на изгиб (радиальная). (Настоящий) |
\([\frac{Nm}{rad}]\) или \([\frac{Nm}{rad^{2}}]\) |
|
Ci |
Демпфирование \(C\) с Ileng=0 или \(\frac{C}{l_{0}}\) с Иленг=1. Если \(i\) =1 Демпфирование растяжения/сжатия. Если \(i\) =2 Демпфирование сдвига (радиальное). (Настоящий) |
\([\frac{Ns}{m}]\) или \([Ns]\) |
Демпфирование \(C\) с Ileng=0 или \(\frac{C}{\theta_{0}}\) с Иленг=1. Если \(i\) =3 Демпфирование кручения. Если \(i\) =4 Демпфирование на изгиб (радиальный). (Настоящий) |
\([\frac{Nms}{rad}]\) или \([Nms]\) |
|
Ai |
Коэффициент деформации эффект ставки. Если \(i\) =1 Коэффициент растяжения/сжатия. Если \(i\) =2 Коэффициент сдвига (радиальный). По умолчанию = 1,0 (реальное) |
\([N]\) |
Коэффициент деформации эффект ставки. Если \(i\) =3 Коэффициент кручения. Если \(i\) =4 Коэффициент на изгиб (радиальный). По умолчанию = 1,0 (реальное) |
\([Nm]\) |
|
Bi |
Логарифмический коэффициент для эффекта скорости деформации. Если \(i\) =1 Коэффициент растяжения/сжатия. Если \(i\) =2 Коэффициент сдвига (радиальный). По умолчанию = 0,0 (реальное) |
\([N]\) |
Логарифмический коэффициент для эффекта скорости деформации. Если \(i\) =3 Коэффициент кручения. Если \(i\) =4 Коэффициент на изгиб (радиальный). По умолчанию = 0,0 (реальное) |
\([Nm]\) |
|
Di |
Коэффициенты деформации для скорости. Если \(i\) =1 Коэффициент растяжения/сжатия. Если \(i\) =2 Коэффициент сдвига (радиальный). По умолчанию = 1,0 (реальное) |
\([\frac{m}{s}]\) |
Коэффициенты деформации для скорости. Если \(i\) =3 Коэффициент кручения. Если \(i\) =4 Коэффициент на изгиб (радиальный). По умолчанию = 1,0 (реальное) |
\([\frac{rad}{s}]\) |
|
fct_ID11 |
Функция жесткости идентификатор. = 0 Линейная пружина. ≠ 0 Нелинейная пружина. Если \(i\) =1 Функция жесткости \(f(\delta)\) в напряжение/сжатие. Если \(i\) =2 Функция жесткости \(f(\delta)\) в сдвиге (радиальный). Если Привет =4: Функция \(f(\delta)\) определение верхней кривой доходности для индекс нагрузки.(Целое число) |
|
Функция жесткости идентификатор. = 0 Линейная пружина. ≠ 0 Нелинейная пружина. Если \(i\) =3 Функция жесткости \(f(\theta)\) в торсионе. Если \(i\) =4 Функция жесткости \(f(\theta)\) при изгибе (радиальный). Если Привет =4: Функция \(f(\theta)\) определение верхней кривой доходности для индекс нагрузки.(Целое число) |
||
Hi |
Флаг усиления для нелинейная пружина в различных вариантах нагрузки с индексом нагрузки \(i\) =1,2,3,4. = 0 Нелинейная упругая пружина. = 1 Нелинейная упругопластическая пружина с изотропным закалка. = 2 Нелинейная упругопластическая пружина с развязанным упрочнением при растяжении и сжатии. = 4 Нелинейная упругая пластиковая пружина с кинематикой закалка. = 5 Нелинейная упругопластическая пружина с нелинейным разгрузка. = 6 Нелинейная упругопластическая пружина изотропной закалки. и нелинейная разгрузка. = 7 Нелинейная пружина с упругим гистерезисом. (Целое число) |
|
fct_ID2i |
Функция, определяющая изменение силы в зависимости от скорости смещения пружины в \(g(\dot{\delta})\) . Если \(i\) =1 Функция \(g(\dot{\delta})\) в напряжение/сжатие. Если \(i\) =2 Функция \(g(\dot{\delta})\) при сдвиге (радиальном). (Целое число) |
|
Функция, определяющая изменение момента в зависимости от скорости вращения пружины \(g(\dot{\theta})\) . Если \(i\) =3 Функция \(g(\dot{\theta})\) в торсионе. Если \(i\) =4 Функция \(g(\dot{\theta})\) при изгибе (радиальный). (Целое число) |
||
fct_ID3i |
Функция используется только для разгрузка в направлении перехода индекс загрузки \(i\) =1,2. Если Привет = 4 Идентификатор функции, определяющий нижнюю кривую доходности (переходный). Если Привет = 5 Идентификатор функции, определяющий остаточное смещение по сравнению с максимальным смещением. Если Привет = 6 Идентификатор функции, определяющий нелинейную выгрузку кривая. Если Привет = 7 Идентификатор функции, определяющий нелинейную кривую разгрузки (относительное перемещение). (Целое число) |
|
Функция используется только для разгрузка в направлении вращения индекс нагрузки \(i\) =3,4. Если Привет = 4 Идентификатор функции, определяющий нижнюю кривую доходности (вращательный). Если Привет = 5 Идентификатор функции, определяющий остаточное вращение по сравнению с максимальное вращение. Если Привет = 6 Идентификатор функции, определяющий нелинейную выгрузку кривая. Если Привет = 7 Кривая разгрузки идентификатора функции для момента по сравнению с вращение (относительное вращение). (Целое число) |
||
fct_ID4i |
Функция, которую следует учитывать демпфирование зависимости скорости или скорости деформации в \(h(\dot{\delta})\) . Если \(i\) =1 Функция \(h(\dot{\delta})\) в напряжение/сжатие. Если \(i\) =2 Функция \(h(\dot{\delta})\) при сдвиге (радиальном). (Целое число) |
|
Функция, которую следует учитывать демпфирование зависимости скорости или скорости деформации в \(h(\dot{\theta})\) . Если \(i\) =3 Функция \(h(\dot{\theta})\) в торсионе. Если \(i\) =4 Функция \(h(\dot{\theta})\) при изгибе (радиальный). (Целое число) |
||
Хскалей |
Масштабный коэффициент однородная сила для \(h(\dot{\delta})\) (функция fct_ID4i). Если \(i\) =1 При растяжении/сжатии. Если \(i\) =2 При сдвиге (радиальном). По умолчанию = 1,0 (реальное) |
\([N]\) |
Масштабный коэффициент однородный момент для \(h(\dot{\theta})\) (функция fct_ID4i). Если \(i\) =3 В торсионе. Если \(i\) =4 При изгибе (радиальном). По умолчанию = 1,0 (реальное) |
\([Nm]\) |
|
Fi |
Масштабный коэффициент для \(\dot{\delta}\) (абсцисса Функция fct_ID2i для \(g(\dot{\delta})\) ) в функции. Если \(i\) =1 При растяжении/сжатии. Если \(i\) =2 При сдвиге (радиальном). (Настоящий) |
\([\frac{m}{s}]\) |
Масштабный коэффициент для \(\dot{\theta}\) (абсцисса Функция fct_ID2i для \(g(\dot{\theta})\) ) в функции. Если \(i\) =3 В торсионе. Если \(i\) =4 При изгибе (радиальном). (Настоящий) |
\([\frac{rad}{s}]\) |
|
\(\delta_{min}^{i}\) |
Индекс загрузки \(i\) =1, 2.Отрицательный переходный предел неудач. По умолчанию = -1030 (Реал) |
|
Если Если ошибка2 = 0, 1: Смещение при разрушении в переходном направлении. |
\([m]\) |
|
Если ЕслиФайл2 = 2: Сила разрушения в переходном направлении. |
\([N]\) |
|
Если ЕслиФайл2 = 3: Сбой внутренней энергии, связанный с переходным направлением. |
\([J]\) |
|
\(\theta_{min}^{i}\) |
Индекс загрузки \(i\) = 3, 4. Отрицательный вращательный провал. предел.По умолчанию = -1030 (Реальный) |
|
Если Если ошибка2 = 0, 1: Ошибка вращения в направлении вращения. |
\([rad]\) |
|
Если ЕслиФайл2 = 2: Разрушающий момент в направлении вращения. |
\([N⋅m]\) |
|
Если ЕслиФайл2 = 3: Внутренняя энергия отказа, связанная с направлением вращения. |
\([J]\) |
|
\(\delta_{max}^{i}\) |
Индекс загрузки \(i\) =1, 2.Положительный переходный предел неудач. По умолчанию = 1030 (Реал) |
|
Если Если ошибка2 = 0, 1: Смещение при разрушении в переходном направлении. |
\([m]\) |
|
Если ЕслиФайл2 = 2: Сила разрушения в переходном направлении. |
\([N]\) |
|
Если ЕслиФайл2 = 3: Сбой внутренней энергии, связанный с переходным направлением. |
\([J]\) |
|
\(\theta_{max}^{i}\) |
Индекс загрузки \(i\) = 3, 4. Положительный вращательный провал. предел.По умолчанию = 1030 (Реальный) |
|
Если Если ошибка2 = 0, 1: Ошибка вращения в направлении вращения. |
\([rad]\) |
|
Если ЕслиФайл2 = 2: Разрушающий момент в направлении вращения. |
\([N⋅m]\) |
|
Если ЕслиФайл2 = 3: Внутренняя энергия отказа, связанная с направлением вращения. |
\([J]\) |
|
Аскалей |
Масштабный коэффициент для \(\delta\) (абсцисса fct_ID1i и fct_ID3i функция для \(f(\delta)\) ). Если \(i\) =1 При растяжении/сжатии. Если \(i\) =2 При сдвиге (радиальном). По умолчанию = 1,0 (реальное) |
\([m]\) |
Масштабный коэффициент для \(\theta\) (абсцисса fct_ID1i и fct_ID3i функция для \(f(\theta)\) ). Если \(i\) =3 В торсионе. Если \(i\) =4 При изгибе (радиальном). По умолчанию = 1,0 (реальное) |
\([rad]\) |
|
Ei |
Масштабный коэффициент для \(g(\dot{\delta})\) (fct_ID2i функция). Это коэффициент влияния скорости деформации (однородная к силе). Если \(i\) =1 При растяжении/сжатии. Если \(i\) =2 При сдвиге (радиальном). (Настоящий) |
\([N]\) |
Масштабный коэффициент для \(g(\dot{\theta})\) (fct_ID2i функция). Это коэффициент влияния скорости деформации (однородная на мгновение). Если \(i\) =3 В торсионе. Если \(i\) =4 При изгибе (радиальном). (Настоящий) |
\([Nm]\) |
|
\(v_{0}\) |
Справочник переводной скорость.По умолчанию = 1,0 (Реальная) |
\([\frac{m}{s}]\) |
\(\omega_{0}\) |
Справочный ротационный скорость.По умолчанию = 1,0 (Реальная) |
\([\frac{rad}{s}]\) |
ci |
Относительная скорость коэффициент в различных вариантах нагрузки (с индексом нагрузки \(i\) =1,2,3,4).По умолчанию = 0,0. (Реал) |
|
Если ЕслиФайл2=0,1: Коэффициент смещения разрушения при \(i\) =1,2.Коэффициент отказа вращение с \(i\) =3,4. |
\([m]\) или \([rad]\) |
|
Если ЕслиФайл2=2: Коэффициент силы разрушения \(i\) =1,2,3.Коэффициент неудачи момент \(i\) =3,4. |
\([N]\) или \([N⋅m]\) |
|
Если ЕслиНеудач2=3: Коэффициент внутренней энергии отказа \(i\) =1,2,3,4. |
\([J]\) |
|
ni |
Относительный показатель скорости. Если \(i\) =1 При растяжении/сжатии. Если \(i\) =2 При сдвиге (радиальном). Если \(i\) =3 В торсионе. Если \(i\) =4 При изгибе (радиальном). По умолчанию = 0,0 (реальное) |
|
\(\alpha_{i}\) |
«Мульт» фактор. Если \(i\) =1 При растяжении/сжатии. Если \(i\) =2 При сдвиге (радиальном). Если \(i\) =3 В торсионе. Если \(i\) =4 При изгибе (радиальном). По умолчанию = 1,0 (реальное) |
|
\(\beta_{i}\) |
Экспонента. Если \(i\) =1 При растяжении/сжатии. Если \(i\) =2 При сдвиге (радиальном). Если \(i\) =3 В торсионе. Если \(i\) =4 При изгибе (радиальном). По умолчанию = 2,0 (реальное) |
Комментарии
В этом весеннем свойстве зависит от
вход, локальная система координат Spring, определяемая входом узла N3, перекос или глобальная система.
Расчет силы и момента:
В случае I длина = 0 , сила пружины рассчитывается как: с
\(i\)
- =1,2
\(F(\delta)=f(\frac{\delta^{i}}{Ascale_{i}})[A_{i}+B_{i}ln(max(1,|\frac{\dot{\delta}^{i}}{D_{i}}|))+E_{i}g(\frac{\dot{\delta}^{i}}{F_{i}})]+C_{i}\dot{\delta}^{i}+Hscale_{i}h(\frac{\dot{\delta}^{i}}{F_{i}})\) с \(i\) =3,4 \(M(\theta)=f(\frac{\theta^{i}}{Ascale_{i}})[A_{i}+B_{i}ln(max(1,|\frac{\dot{\theta}^{i}}{D_{i}}|))+E_{i}g(\frac{\dot{\theta}^{i}}{F_{i}})]+C_{i}\dot{\theta}^{i}+Hscale_{i}h(\frac{\dot{\theta}^{i}}{F_{i}})\) с
- \(−l_{0}<\delta<+\infty\)
Где, - \(\delta^{i}\)
(с \(−l_{0}<\delta^{i}<+\infty\) ) — это разница между
текущая длина
\(l\) и начальная длина \(l_{0}\) пружинного элемента для
соответствующая поступательная степень свободы.
\(\theta^{i}\) это относительный угол для
соответствующая угловая глубина резкости в радианах.
Для линейных пружин \(f(\delta)\) , \(g(\dot{\delta})\) , ( \(h(\dot{\delta}),f(\theta),g(\dot{\theta})\) и \(h(\dot{\theta})\) ) являются нулевыми функциями и A i , B i , E i , и Hscale i не принимаются во внимание
счет.
Если функция жесткости \(f(\delta)\) (or \(f(\theta)\) ) запрашивается, то K используется как откос для разгрузки
только.
If K ниже максимального наклона
функция
\(f(\delta)\) (or \(f(\theta)\) ), K есть
не соответствует максимальному наклону кривой),
K установлен на максимальный наклон
кривая.
If I длина = 1, все входные данные относятся к единице длины: Пружинная масса =
- \(M⋅l_{0}\)
Жесткость пружины =
- \(\frac{K}{l_{0}}\)
Пружинное демпфирование =
- \(\frac{C}{l_{0}}\)
Инерция пружины =
- \(I⋅l_{0}\)
Где,
\(l_{0}\) это ссылка на весну длина.
Сила пружины рассчитывается, с
\(i\)
- =1,2
\(F(\epsilon)=f(\frac{\epsilon^{i}}{Ascale_{i}})[A_{i}+B_{i}ln(max(1,|\frac{\dot{\epsilon}^{i}}{D_{i}}|))+E_{i}g(\frac{\dot{\epsilon}^{i}}{F_{i}})]+C_{i}\dot{\epsilon}^{i}+Hscale_{i}h(\frac{\dot{\epsilon}^{i}}{F_{i}})\) с
\(i\)
- =3,4
\(M(\theta)=f(\frac{\theta^{i}}{Ascale_{i}})[A_{i}+B_{i}ln(max(1,|\frac{\dot{\theta}^{i}}{D_{i}}|))+E_{i}g(\frac{\dot{\theta}^{i}}{F_{i}})]+C_{i}\dot{\theta}^{i}+Hscale_{i}h(\frac{\dot{\theta}^{i}}{F_{i}})\) Где, \(\epsilon^{i}\) инженерное напряжение и
определяется как:
\(\epsilon^{i}=\frac{\delta^{i}}{l_{0}}\) - Силовые функции даны в зависимости от инженерной деформации и
- инженерная скорость деформации.
Критерии разрушения определяются относительно деформации. Ввод
отрицательный/положительный предел отказа должен быть связан с начальная длина.
Разделенная закалка (закалка
флаг, Hi=2) и кинематика усиление (флаг усиления, Hi=4) модели действительны только в осевом направлении (растяжение и кручение). Они не доступны в радиальном направлении (сдвиг и изгиб).
Пружина активирована и/или
отключено датчиком:
Если sens_ID ≠ 0 и Isflag = 0, пружинный элемент активируется sens_ID.
Если sens_ID ≠ 0 и Isflag = 1, пружинный элемент деактивируется с помощью sens_ID.
В основном используются пружинные элементы с сенсорной активацией или деактивацией.
- для претензионной модели.
Если для активации или деактивации пружины используется датчик,
эталонная длина пружины при активации (или деактивации) датчика равна равно узловому расстоянию в момент времени =0.